
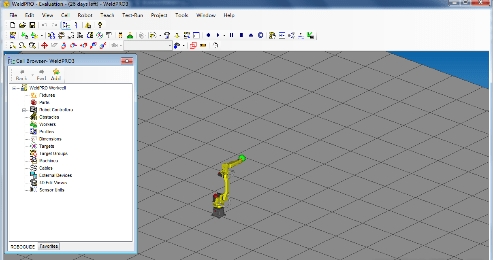
发那科机器人仿真软件

发那科机器人仿真软件是一款功能强大的机器人仿真软件,这款软件功能强大,用户可以通过发那科机器人仿真软件 来完成机器人的开发,并且还可以在电脑上进行虚拟操作,非常的好用,快速的提升效率,有需要的用户快来下载吧!

软件特色
具有图形化UIF组件的完全集成的环境可简化机器人单元的教学过程。
流程浏览器。
广泛的工作单元教程
有关如何操作软件的过程的广泛帮助。
示例工作单元
完整的3D世界环境:具有缩放,平移和旋转功能。
机器人慢跑:手臂拖放教学工具和传统的教学吊坠式慢跑结束。
单个机器人工作单元:支持多个机器人。
软件功能
【工作单元库】
基本CAD模型的CAD库
能够将自己的图像添加到库中
【创建多组和多轴机床】
轻松创建由机器人控制器电机驱动的机器。电机可以是扩展轴或多组定义的控制器配置。
【程序教学】
创建基本的TPP程序
通过慢跑机器人,手动输入或单击单元格中的对象来教导TPP位置。
支持MHPICK和PLACE位置的自动示教。
运动陈述,等待陈述支持。
单个正在运行的程序支持。稍后支持多个正在运行的程序。
打开/关闭手视图设置
打开/关闭手指令,使工作单元拾取和放置应用程序具有动画效果。
从CAD生成程序:在CAD文件中查找实体,并使用这些实体自动生成机器人程序。此功能可以大大减少编程时间。
【支持UTOOLS】
将工具图形附加到机器人上以进行打开和关闭成像。
定义UTOOL值。
【支持UFRAMES】
将UFRAMES与工作单元对象相关联。
相对于UFRAMES进行教学。允许移动带有零件/夹具的示教位置以检查范围。
快速将示教参考系从世界坐标更改为UFRAME坐标系。
大小:5.40 GB
更新时间:2021-11-06 17:44:29
开发者:暂无认领
其他版本
同类软件





 FIFISH(智能水下机器人)
FIFISH(智能水下机器人)
 小喜智能量化机器人
小喜智能量化机器人
 智伴优学连机器人官网安装 v4.4.7
智伴优学连机器人官网安装 v4.4.7
 录音机器
录音机器
 机器猫盲盒
机器猫盲盒
 qq机器人
qq机器人
 机器猫盲盒
机器猫盲盒
 口语机器人
口语机器人
 机器人医生
机器人医生
 仿真暗棋
仿真暗棋
 仿真键鼠
仿真键鼠
 仿真秀
仿真秀
 期货仿真
期货仿真
 FANUC数控仿真系统
FANUC数控仿真系统
 在线制作仿真病历
在线制作仿真病历
 帕罗博士的英语少儿英语学习软件下载 v1.9
帕罗博士的英语少儿英语学习软件下载 v1.9
 雅讯聊天安装最新版本软件 v1.0.9
雅讯聊天安装最新版本软件 v1.0.9
 默往软件安卓版 v3.20.8
默往软件安卓版 v3.20.8
 12306买火车票软件
12306买火车票软件
 enigma社交软件
enigma社交软件
 恒记(记账软件)
恒记(记账软件)
 AirDroid-远程控制手机软件
AirDroid-远程控制手机软件
 变声器手机版软件
变声器手机版软件
 Cutie软件最新版
Cutie软件最新版
 机器工厂大亨
机器工厂大亨
 宝宝机器人餐厅
宝宝机器人餐厅
 机器人大战毁灭枪手2
机器人大战毁灭枪手2
 变形机器枪战
变形机器枪战
 逃脱机器城
逃脱机器城
 飞行消防员机器人游戏安卓版 v1.5
飞行消防员机器人游戏安卓版 v1.5
 奇怪的机器人
奇怪的机器人
 机器人组装进攻游戏官方版 v0.1.0
机器人组装进攻游戏官方版 v0.1.0
 警犬变形机器人
警犬变形机器人
 王者荣耀仿真单机版 v3.71.1.8
王者荣耀仿真单机版 v3.71.1.8
 宇宙飞行仿真器中文版破解版
宇宙飞行仿真器中文版破解版
 仿真暗棋
仿真暗棋
 仿真技术2
仿真技术2
 时尚仿真
时尚仿真
 仿真警车
仿真警车
 仿真武器
仿真武器
 仿真出租车停车
仿真出租车停车
 仿真飞机
仿真飞机
 pret-a-makeup化妆软件中文版 v1.0
pret-a-makeup化妆软件中文版 v1.0
 emoji合成器软件官方正版 v1.0
emoji合成器软件官方正版 v1.0
 艺术贴贴软件app免费下载 v1.0.0
艺术贴贴软件app免费下载 v1.0.0
 emoji合成器软件下载安装 v1.0
emoji合成器软件下载安装 v1.0
 万能投屏软件
万能投屏软件
 猛男俱乐部软件.apk
猛男俱乐部软件.apk
 奇门遁甲软件 版
奇门遁甲软件 版
 女人3d模型制作软件安卓
女人3d模型制作软件安卓
 3d人体模型软件
3d人体模型软件